




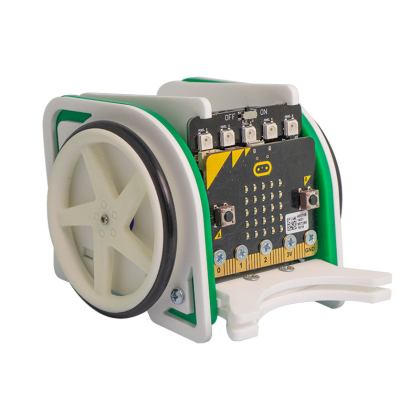
Add line following to your BBC microbit Robot/buggy projects with the :Move Line Following Board for BBC micro:bit.
Although designed with the :MOVE mini in mind, this board can be used to add line following to any micro:bit buggy. If adding line following to the :MOVE mini, you will need the Line Following add-on for :MOVE mini instead. This is because the fixings for the :MOVE mini are not included in this kit.
The board can be used to either follow a dark line on a light background or a light line on a dark background. For best results, ensure there is approx. 5mm clearance between the bottom of the board and the driving surface.
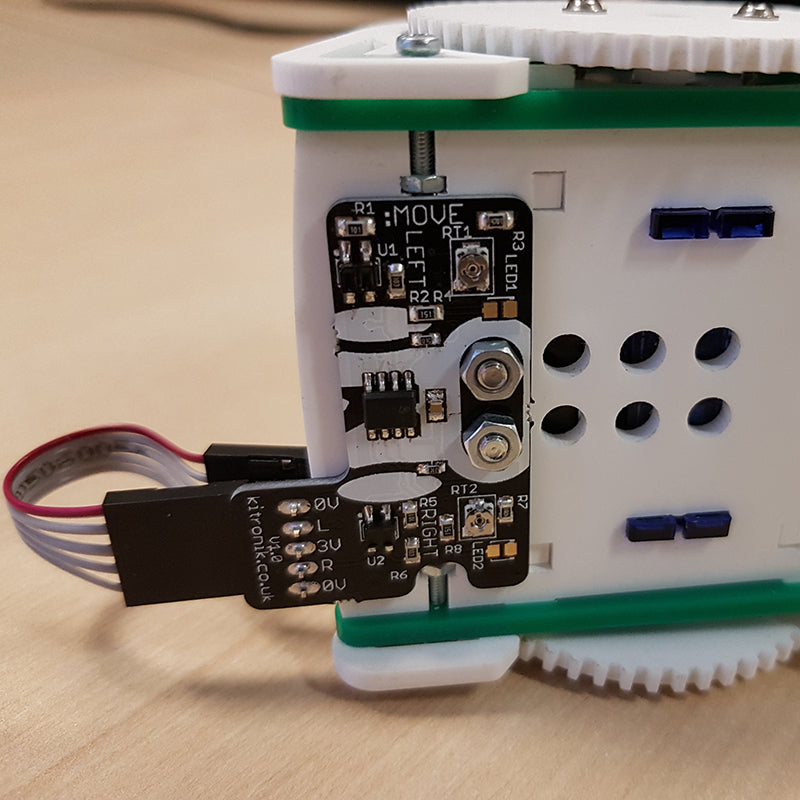
The sensitivity of the line following can be adjusted via the two onboard pots, one for each detector. The same pots are also used to change the type of line that will be followed; to detect darker, turn the pot clockwise and to detect lighter, turn the pot anti-clockwise.
The board has an operating voltage (Vcc) of 3V and is rated for a max current of less than 1mA.
There are two output channels via a 5 pin output that has the following configuration; 0V / Left Detector / 3V / Right Detector / 0V.
Features:
- Add line following to your microbit Robot/buggy.
- Can be attached directly to the underside of the :MOVE mini.
- Can either follow a dark line on a light background or a light line on a dark background.
- The line following sensitivity can be adjusted with a screwdriver.
- No Soldering is required.
- Example line following code is provided.
Contents:
- 1 x :MOVE Line Following board for the BBC micro:bit.
Dimensions:
- Length: 43.7mm.
- Width: 31.5mm.
- Max height: 5.7mm
- Pin Header Pitch: 2.54mm.
Requires:
- 1 x BBC micro:bit.
- 1 x Small flat-bladed screwdriver.





Eric –
Hi,
I encountered a couple of troubles for mounting the sensor on the MK2 version of the “:MOVE” robot :
– the slot on the right side of the board is not properly aligned with the nut of the robot side panel assembly, and thus the board cannot sit flat on the chassis plate. You have to insert spacers between the board and the plate to have it installed correctly and not touching the chassis nut.
– it is not possible to use the nuts for the provided M8 bolts since there is not enough clearance above the chassis plate of the robot, between it and the battery case of the Servo:Lite board. Fortunately, the holes are a bit tight, so the screw can self-tap into the plate and the nuts are not required.
Not sure if the problems are on the sensor kit side, or on the one of the MK2 version.
Best regards